{kind=link}
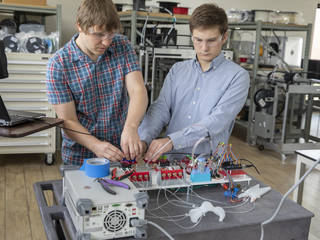
May 8, 2019 – In the Makerspace Lab at NASA’s Langley Research Center, two interns are working on soft robots for use in space exploration and assembly of space infrastructure.
What is a soft robot?
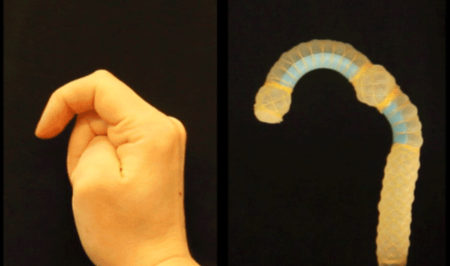
Our normal perception of robots involves metal, solid plastic, gears, and lots of electronics. But a soft robot resembles something living as it moves or accomplishes tasks. Imagine an object that lies flat until instructed to morph into a five-finger shape to accomplish a task. That’s the idea behind soft robots.
A soft robot has many advantages. Its shape-shifting capacity is just one. Attached to a different type of computer controller it can be repurposed to do different tasks.
It can be made from silicone rubber or other soft materials. It can handle irregular-shaped objects. It can be squeezed and recover its shape. Hit it and it can rebound. And in tight spaces, it can go where no mechanical robot or human has gone before.
Who are the soft robot interns at NASA and what are they trying to accomplish?
Chuck Sullivan and Jack Fitzpatrick are the research pair who describe their goal “to see the basic capabilities of soft robots” with a focus on four properties:
- Mobility – developing the technology to move across a surface.
- Joining – exploring how to make robots link together.
- Leveling – having the robots temporarily fill in spaces to create a level environment for another device, or habitat, etc.
- Strengthening – using the soft membrane’s capacity to inflate to alter existing hard infrastructure to make it more resilient.
The two hope that the robots they create can be used in “dangerous, dirty, or dull” situations to keep human crews in space, on the Moon, or on Mars, safe and productive. For Fitzpatrick, this is his fourth NASA internship.
The real key to making soft robots other than choosing the right materials that can survive in the hostile environment of space, is to design a control mechanism to operate them. Called actuators. Sullivan and Fitzpatrick have been building and testing a number of designs to begin experiments to achieve the functionalities described above. In the image below you can see the two of them working on one of their designs.
The potential versatility of soft robots makes the pursuit of what the two interns are doing worthwhile. A soft robot can be more adaptive, more capable of interacting with an unpredictable environment, with unknown objects and shapes, and unknown placement of these objects. That pretty much describes the surface of the Moon and Mars. A robot that can approach such an object, and figure out how to deal with it, represents a solution seeking an invention.
Fitzpatrick and Sullivan will soon know if their pursuit of invention is paying dividends as they have their designs put through the wringer when experts in the field visit Langley this month. The project is expected to continue through this summer.
Related Posts
 Moon News: A Robot Excavator, Water on the Moon, and Likely Changes to the Artemis Program
Moon News: A Robot Excavator, Water on the Moon, and Likely Changes to the Artemis Program NASA, Artemis, and Mars Timelines – Part 2: Addressing Remaining Challenges
NASA, Artemis, and Mars Timelines – Part 2: Addressing Remaining Challenges- NASA, Artemis, and Mars Timelines – Part 1: Something Is Amiss
 From Trash to Treasure: Revolutionizing Waste Management
From Trash to Treasure: Revolutionizing Waste Management  New Clues To How Life Came About Are Revising Our Thinking On How We Got Here
New Clues To How Life Came About Are Revising Our Thinking On How We Got Here Designed Proteins Will Revolutionize Medical Treatment
Designed Proteins Will Revolutionize Medical Treatment Science Without The Humanities In College Is Poor Education
Science Without The Humanities In College Is Poor Education McGill University Alumni Develop A Synthetic Medical Image Generation Tool
McGill University Alumni Develop A Synthetic Medical Image Generation Tool